







ડાબા હાથનો નિયમ, જમણા હાથનો નિયમ, જમણા હાથનો સ્ક્રૂ નિયમ.ડાબી બાજુનો નિયમ, આ મોટરના પરિભ્રમણના બળના વિશ્લેષણ માટેનો આધાર છે.સરળ શબ્દોમાં કહીએ તો, તે ચુંબકીય ક્ષેત્રમાં વર્તમાન-વહન વાહક છે, જે બળથી પ્રભાવિત થશે.
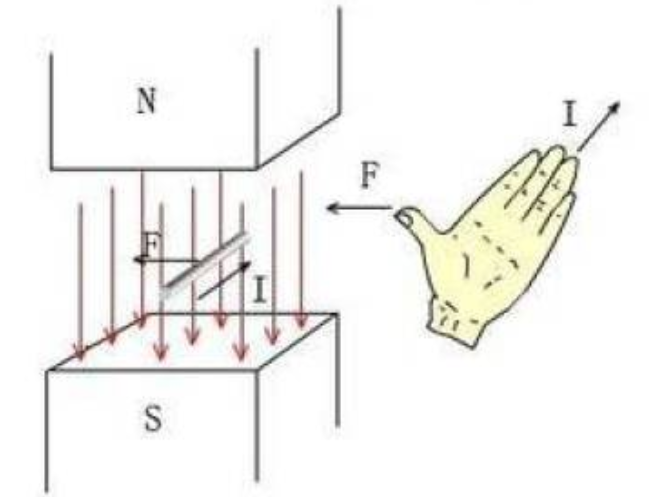
ચુંબકીય ક્ષેત્રની રેખાને હથેળીના આગળના ભાગમાંથી પસાર થવા દો, આંગળીઓની દિશા એ પ્રવાહની દિશા છે અને અંગૂઠાની દિશા એ ચુંબકીય બળની દિશા છે.બળનું ટ્રેક્શન ઇલેક્ટ્રોમોટિવ બળ પેદા કરવા માટે ચુંબકીય ક્ષેત્રની રેખાઓને કાપી નાખે છે.
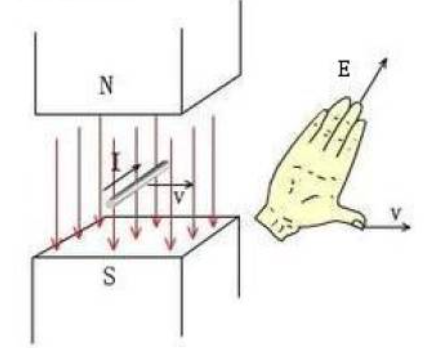
ચુંબકીય ક્ષેત્રની રેખાને હથેળીમાંથી પસાર થવા દો, અંગૂઠાની દિશા ગતિની દિશા છે, અને આંગળીની દિશા એ ઉત્પન્ન થયેલ ઇલેક્ટ્રોમોટિવ બળની દિશા છે.શા માટે પ્રેરિત ઇલેક્ટ્રોમોટિવ બળ વિશે વાત કરો?મને ખબર નથી કે તમને કોઈ સમાન અનુભવ છે કે નહીં.જ્યારે તમે મોટરના થ્રી-ફેઝ વાયરને જોડો છો અને મોટરને હાથથી ફેરવો છો, ત્યારે તમે જોશો કે પ્રતિકાર ઘણો મોટો છે.આ એટલા માટે છે કારણ કે મોટરના પરિભ્રમણ દરમિયાન ઇન્ડક્શન થાય છે.ઇલેક્ટ્રોમોટિવ ફોર્સ વર્તમાન પેદા કરે છે, અને ચુંબકીય ક્ષેત્રમાં વાહકમાંથી વહેતો પ્રવાહ પરિભ્રમણની દિશાની વિરુદ્ધ બળ ઉત્પન્ન કરશે, અને દરેકને લાગશે કે પરિભ્રમણ માટે ઘણો પ્રતિકાર છે.
થ્રી-ફેઝ વાયરને અલગ કરવામાં આવે છે અને મોટરને સરળતાથી ફેરવી શકાય છે
ત્રણ તબક્કાની રેખાઓ સંયુક્ત છે, અને મોટરનો પ્રતિકાર ખૂબ મોટો છે.જમણા હાથના સ્ક્રૂના નિયમ મુજબ, જમણા હાથથી ઊર્જાયુક્ત સોલેનોઇડને પકડી રાખો, જેથી ચાર આંગળીઓ વર્તમાનની દિશામાં જ વળેલી હોય, પછી અંગૂઠા દ્વારા નિર્દેશિત છેડો એ એનર્જાઇઝ્ડ સોલેનોઇડનો N ધ્રુવ છે.
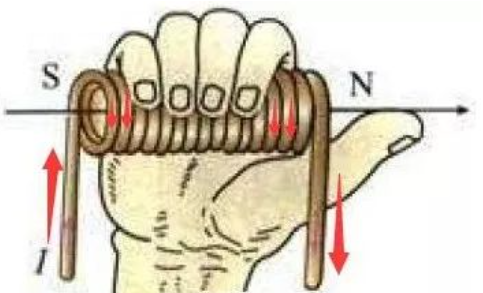
આ નિયમ એ એનર્જાઇઝ્ડ કોઇલની ધ્રુવીયતાને નક્કી કરવા માટેનો આધાર છે, અને લાલ તીરની દિશા એ વર્તમાન દિશા છે.ત્રણ નિયમો વાંચ્યા પછી, ચાલો મોટર પરિભ્રમણના મૂળભૂત સિદ્ધાંતો પર એક નજર કરીએ.પ્રથમ ભાગ: ડીસી મોટર મોડલ અમે ડીસી મોટરનું મોડેલ શોધીએ છીએ જેનો અભ્યાસ હાઇસ્કૂલ ભૌતિકશાસ્ત્રમાં કરવામાં આવ્યો છે, અને ચુંબકીય સર્કિટ વિશ્લેષણ પદ્ધતિ દ્વારા સરળ વિશ્લેષણ હાથ ધરે છે.
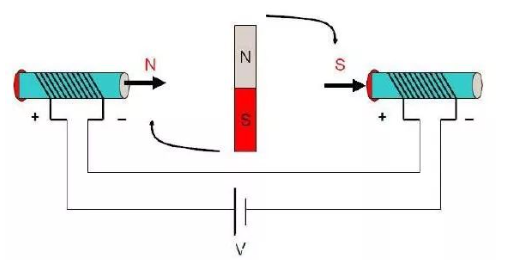
સ્થિતિ 1 જ્યારે બંને છેડે કોઇલ પર કરંટ લાગુ કરવામાં આવે છે, ત્યારે જમણી બાજુના સ્ક્રૂના નિયમ અનુસાર, લાગુ ચુંબકીય ઇન્ડક્શન ઇન્ટેન્સિટી B (જાડા તીર દ્વારા દર્શાવ્યા પ્રમાણે) જનરેટ થશે, અને મધ્યમાં રોટર બનાવવાનો પ્રયાસ કરશે. શક્ય હોય ત્યાં સુધી તેની આંતરિક ચુંબકીય ઇન્ડક્શન લાઇનની દિશા.બાહ્ય ચુંબકીય ક્ષેત્ર રેખાની દિશા એક ટૂંકી બંધ ચુંબકીય ક્ષેત્ર રેખા લૂપ બનાવવા માટે સુસંગત છે, જેથી આંતરિક રોટર ઘડિયાળની દિશામાં ફેરવશે.જ્યારે રોટરના ચુંબકીય ક્ષેત્રની દિશા બાહ્ય ચુંબકીય ક્ષેત્રની દિશાને લંબરૂપ હોય છે, ત્યારે રોટરનો રોટેશનલ ટોર્ક સૌથી મોટો હોય છે.નોંધ કરો કે "ક્ષણ" સૌથી મોટી હોવાનું કહેવાય છે, "બળ" નહીં.તે સાચું છે કે જ્યારે રોટરનું ચુંબકીય ક્ષેત્ર બાહ્ય ચુંબકીય ક્ષેત્રની દિશામાં હોય છે, ત્યારે રોટર પરનું ચુંબકીય બળ સૌથી મોટું હોય છે, પરંતુ આ સમયે રોટર આડી સ્થિતિમાં હોય છે અને બળ હાથ 0 હોય છે, અને તેમાંથી અલબત્ત તે ફેરવશે નહીં.ઉમેરવા માટે, ક્ષણ એ બળ અને બળના હાથનું ઉત્પાદન છે.જો તેમાંથી એક શૂન્ય છે, તો ઉત્પાદન શૂન્ય છે.જ્યારે રોટર આડી સ્થિતિ તરફ વળે છે, જો કે તે લાંબા સમય સુધી રોટેશનલ ટોર્કથી પ્રભાવિત નથી, તે જડતાને કારણે ઘડિયાળની દિશામાં ફેરવવાનું ચાલુ રાખશે.આ સમયે, જો નીચેની આકૃતિમાં બતાવ્યા પ્રમાણે, બે સોલેનોઇડ્સની વર્તમાન દિશા બદલવામાં આવે, તો રોટર ફેરવવાનું ચાલુ રાખશે.ઘડિયાળની દિશામાં આગળ વળો,
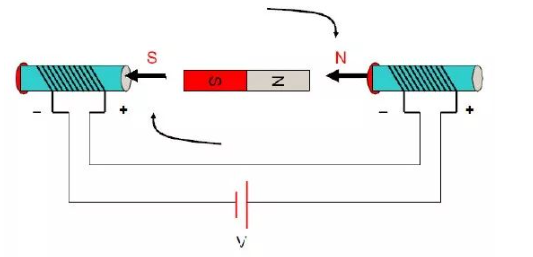
રાજ્ય 2 માં, બે સોલેનોઇડ્સની વર્તમાન દિશા સતત બદલાતી રહે છે, અને આંતરિક રોટર ફેરવવાનું ચાલુ રાખશે.પ્રવાહની દિશા બદલવાની આ ક્રિયાને કમ્યુટેશન કહેવામાં આવે છે.બાજુની નોંધ: ક્યારે ફરવું તે માત્ર રોટરની સ્થિતિ સાથે સંબંધિત છે અને અન્ય કોઈપણ જથ્થા સાથે સીધું સંબંધિત નથી.ભાગ 2: થ્રી-ફેઝ બે-પોલ આંતરિક રોટર મોટર સામાન્ય રીતે કહીએ તો, સ્ટેટરના ત્રણ-તબક્કાના વિન્ડિંગ્સમાં સ્ટાર કનેક્શન મોડ અને ડેલ્ટા કનેક્શન મોડ હોય છે, અને "થ્રી-ફેઝ સ્ટાર કનેક્શનનો બે-બે વહન મોડ" સૌથી સામાન્ય છે. વપરાય છે, જે અહીં વપરાય છે.આ મોડેલનો ઉપયોગ સરળ વિશ્લેષણ માટે થાય છે.
ઉપરોક્ત આકૃતિ બતાવે છે કે સ્ટેટર વિન્ડિંગ્સ કેવી રીતે જોડાયેલા છે (રોટર અનુમાનિત બે-ધ્રુવ ચુંબક તરીકે દર્શાવવામાં આવ્યું નથી), અને ત્રણ વિન્ડિંગ્સ કેન્દ્રિય જોડાણ બિંદુ દ્વારા "Y" આકારમાં એકસાથે જોડાયેલા છે.આખી મોટર ત્રણ વાયર A, B, C તરફ દોરી જાય છે. જ્યારે તેઓ બે બાય બે એનર્જાઇઝ્ડ થાય છે, ત્યારે AB, AC, BC, BA, CA, CB એમ 6 કેસ હોય છે.નોંધ કરો કે આ ક્રમમાં છે.
હવે હું પ્રથમ તબક્કાને જોઉં છું: એબી તબક્કો ઉત્સાહિત છે
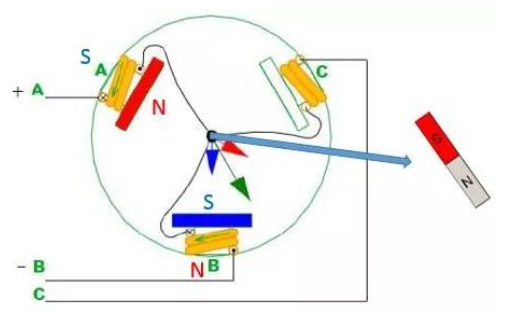
જ્યારે AB તબક્કો સક્રિય થાય છે, ત્યારે A ધ્રુવ કોઇલ દ્વારા ઉત્પન્ન થતી ચુંબકીય ક્ષેત્ર રેખાની દિશા લાલ તીર દ્વારા બતાવવામાં આવે છે, અને B ધ્રુવ દ્વારા ઉત્પન્ન થતી ચુંબકીય ક્ષેત્ર રેખાની દિશા વાદળી તીર દ્વારા બતાવવામાં આવે છે, પછી દિશા પરિણામી બળ લીલા તીર દ્વારા બતાવવામાં આવે છે, પછી એમ ધારી રહ્યા છીએ કે ત્યાં બે-ધ્રુવ ચુંબક છે, N-ધ્રુવની દિશા લીલા તીર દ્વારા દર્શાવેલ દિશા સાથે એકરુપ હશે જે મુજબ "મધ્યમાં રોટર રાખવાનો પ્રયત્ન કરશે. તેની આંતરિક ચુંબકીય ક્ષેત્ર રેખાઓની દિશા બાહ્ય ચુંબકીય ક્ષેત્ર રેખાઓની દિશા સાથે સુસંગત છે”.C માટે, તેને હાલમાં તેની સાથે કોઈ લેવાદેવા નથી.
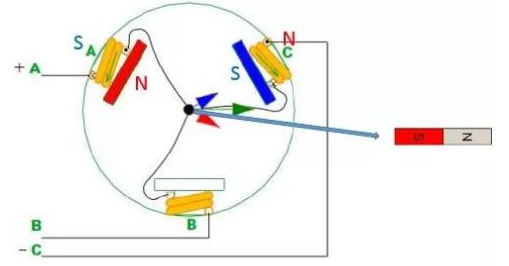
સ્ટેજ 2: એસી ફેઝ એનર્જીઝ્ડ
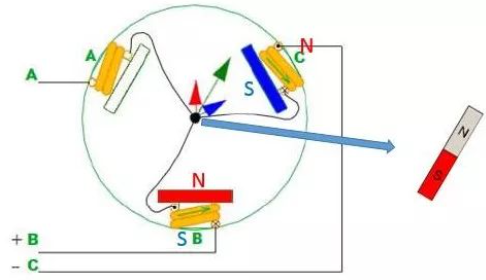
ત્રીજો તબક્કો: BC તબક્કાનું વિદ્યુતીકરણ
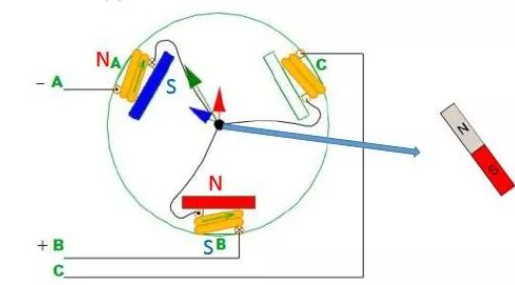
ત્રીજો તબક્કો: BA તબક્કો ઉત્સાહિત છે
મધ્યવર્તી ચુંબક (રોટર) નું સ્ટેટ ડાયાગ્રામ નીચે મુજબ છે: દરેક પ્રક્રિયા રોટર 60 ડિગ્રી ફરે છે

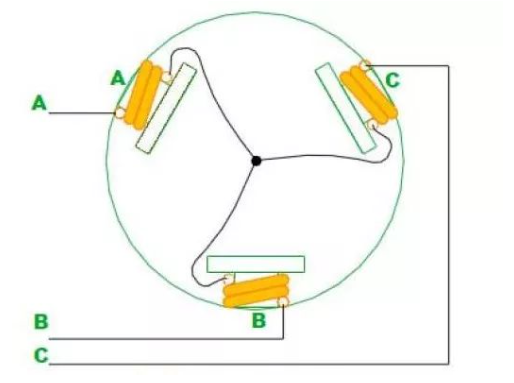
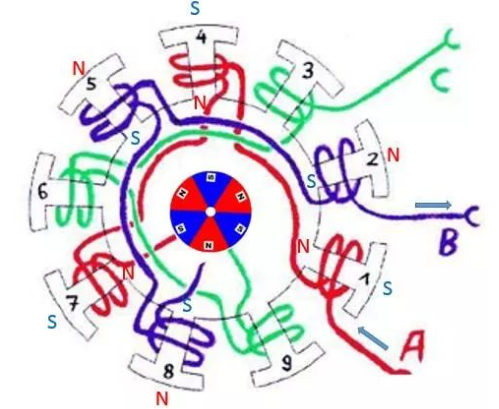
સંપૂર્ણ પરિભ્રમણ છ પ્રક્રિયાઓમાં પૂર્ણ થાય છે, જેમાંથી છ પરિભ્રમણ કરવામાં આવે છે.ત્રીજો ભાગ: થ્રી-ફેઝ મલ્ટિ-વિન્ડિંગ મલ્ટિ-પોલ ઇનર રોટર મોટર ચાલો વધુ જટિલ બિંદુ જોઈએ.આકૃતિ (a) એ ત્રણ-તબક્કાની નવ-વાઇન્ડિંગ સિક્સ-પોલ (ત્રણ-તબક્કા, નવ-વાઇન્ડિંગ, છ-ધ્રુવ) મોટર છે.વિરુદ્ધ ધ્રુવ) આંતરિક રોટર મોટર, તેનું વિન્ડિંગ કનેક્શન આકૃતિ (b) માં બતાવવામાં આવ્યું છે.તે આકૃતિ (b) પરથી જોઈ શકાય છે કે ત્રણ તબક્કાના વિન્ડિંગ્સ પણ મધ્યવર્તી બિંદુ પર એકસાથે જોડાયેલા છે, જે એક સ્ટાર કનેક્શન પણ છે.સામાન્ય રીતે કહીએ તો, મોટરના વિન્ડિંગ્સની સંખ્યા કાયમી ચુંબક ધ્રુવોની સંખ્યા સાથે અસંગત હોય છે (ઉદાહરણ તરીકે, 6 વિન્ડિંગ્સ અને 6 ધ્રુવોને બદલે 9 વિન્ડિંગ્સ અને 6 પોલનો ઉપયોગ કરવામાં આવે છે), જેથી સ્ટેટરના દાંતને અટકાવી શકાય અને આકર્ષિત અને સંરેખિત થવાથી રોટરના ચુંબક.
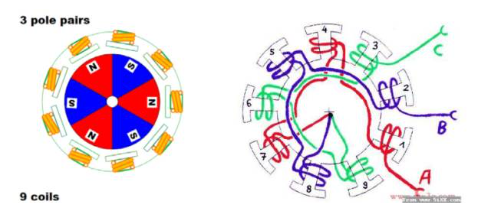
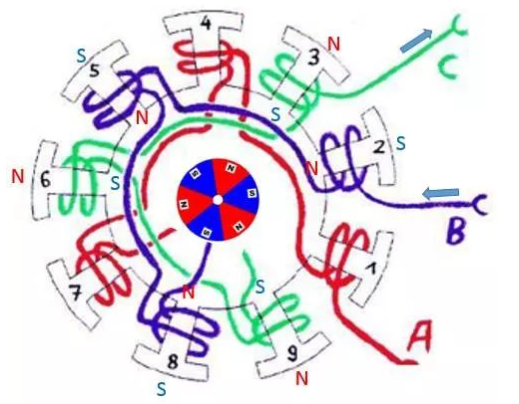
તેની ગતિનો સિદ્ધાંત છે: રોટરનો N ધ્રુવ અને એનર્જીઝ્ડ વિન્ડિંગનો S ધ્રુવ સંરેખિત થવાની વૃત્તિ ધરાવે છે, અને રોટરના S ધ્રુવ અને એનર્જાઇઝ્ડ વિન્ડિંગના N ધ્રુવને સંરેખિત કરવાની વૃત્તિ છે.એટલે કે, S અને N એકબીજાને આકર્ષે છે.નોંધ કરો કે તે અગાઉની વિશ્લેષણ પદ્ધતિથી અલગ છે.સારું, ચાલો તમને તેનું ફરીથી વિશ્લેષણ કરવામાં મદદ કરીએ.પ્રથમ તબક્કો: એબી તબક્કો ઇલેક્ટ્રિફાઇડ છે
સ્ટેજ 2: એસી ફેઝ એનર્જીઝ્ડ

ત્રીજો તબક્કો: BC તબક્કાનું વિદ્યુતીકરણ
પોસ્ટનો સમય: ઑક્ટો-21-2022